[eJOI 2025] Navigation
说明
有一个连通无向简单仙人掌图,包含 个节点和 条边。节点带有颜色(用 到 之间的非负整数表示)。最初所有节点的颜色均为 。有一个确定性无记忆机器人在该图中探索,它通过在节点之间移动来完成探索任务。它必须至少访问所有节点一次,然后终止。
机器人从某个节点开始,这个节点可以是图中的任意节点。在每一步中,它能看到自己所在节点的颜色,以及所有相邻节点的颜色——相邻节点的顺序对于当前节点是固定的(即使重新访问节点时,相邻节点的颜色已经不同,机器人看到的顺序仍然保持不变)。机器人在每一步中必须执行以下两个动作之一:
- 决定终止。
- 为当前节点选择一个新的(或保持原样的)颜色,并选择要移动到的一个相邻节点。相邻节点用索引 到 标识,其中 是相邻节点的数量。
在第二种情况下,当前节点会被重新染色(或保持原有颜色),然后机器人移动到所选的相邻节点。这个过程不断重复,直到机器人终止,或者达到迭代上限。若机器人能在 步迭代内访问所有节点并终止,则视为胜利,否则失败。
你需要为机器人设计一个策略,使其能在任意这样的仙人掌图上完成任务。同时,你还需要尽量减少使用的不同颜色的数量。注意,颜色 永远计入已使用的颜色。
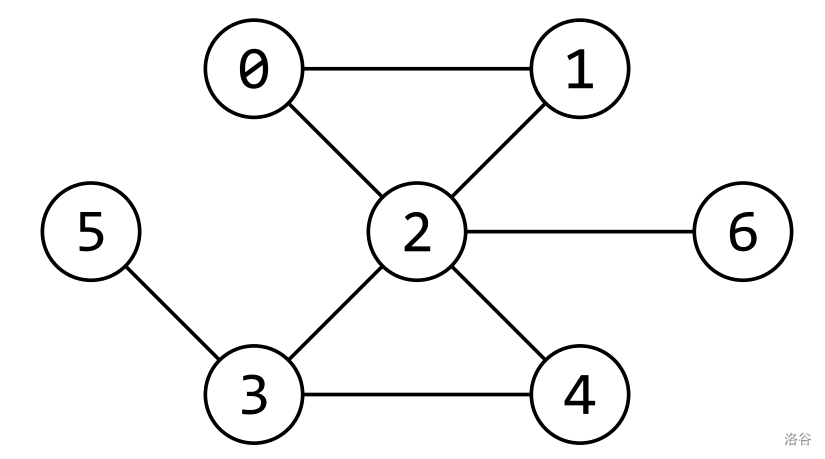
连通无向简单仙人掌图是一个连通无向简单图(任意节点间均可达,边是双向的,没有自环或重边),并且每条边至多属于一个简单环(简单环指每个节点最多出现一次的环)。下图是一个例子:
:::align{center}
 :::
:::
若机器人的动作只依赖于当前输入(即不存储任何历史信息),并且在相同输入下总是做出相同动作,那么它是确定性无记忆机器人。
实现细节
机器人的策略应实现如下函数:
std::pair<int, int> navigate(int currColor, std::vector<int> adjColors)
- 参数为当前节点的颜色
currColor和所有相邻节点的颜色(顺序固定)。 - 返回一个二元组:
- 第一个元素表示当前节点的新颜色;
- 第二个元素表示机器人要移动到的相邻节点索引。
- 如果机器人应终止,则返回 。
该函数会被反复调用以决定机器人的动作。由于它是确定性的,如果 navigate 已经在某些参数下被调用过,则不会再用相同参数调用,而是直接复用上一次的返回值。此外,每个测试最多包含 个子测试(不同的图或起始点),这些子测试可能并发运行(即你的程序可能会交替收到不同子测试的调用)。最后,navigate 的调用可能发生在不同的程序执行中(也可能有时发生在同一次执行中)。你的程序总共会被执行 次。因此,程序不应尝试在不同调用之间传递信息。
提示
示例
考虑题面图示中的样例图,有 个节点, 条边:,,,,,,,。此外,由于相邻节点顺序与节点的邻接表顺序相关,我们在下表中给出:
| 节点 | 相邻节点 |
|---|---|
| 0 | 2, 1 |
| 1 | 2, 0 |
| 2 | 0, 3, 4, 6, 1 |
| 3 | 4, 5, 2 |
| 4 | 2, 3 |
| 5 | 3 |
| 6 | 2 |
假设机器人从节点 5 开始,则可能出现如下(失败的)交互过程:
| 步骤 | 节点颜色 | 所在节点 | 调用 navigate | 返回值 |
|---|---|---|---|---|
| 1 | 5 | navigate | ||
| 2 | 3 | navigate | ||
| 3 | 2 | navigate | ||
| 4 | 6 | navigate | ||
| 5 | 2 | navigate | ||
| 6 | 0 | navigate | ||
| 7 | 2 | navigate | ||
| 8 | 4 | navigate | ||
| 9 | 3 | navigate |
此过程中机器人使用了 6 种不同颜色:(注意即使机器人从未返回颜色 ,由于所有节点初始颜色为 ,它仍计入使用的颜色)。机器人共执行 9 次迭代后终止,但失败了,因为它在终止时尚未访问节点 1。
注意第 4 步的调用实际上不会发生,因为它与第 1 步的调用参数完全相同,测评器会直接复用第 1 步的返回值。但它仍然计入机器人迭代次数。
样例测评器
样例测评器不会多次执行你的程序,因此所有对 navigate 的调用都会发生在同一次程序执行中。
输入格式如下:首先读入 (子测试数量)。然后对每个子测试:
- 第 1 行:三个整数 (图的节点数、边数、机器人起始节点)。
- 接下来 行:每行两个整数 ,表示边 连接的两个节点()。
样例测评器会打印出你的解使用的不同颜色数量,以及终止前的迭代次数。若解失败,会打印错误信息。
默认情况下,样例测评器会输出机器人每步看到的状态和执行的动作。你可以通过将 DEBUG 从 true 改为 false 来关闭此功能。
约束条件
评分规则
在某个子任务中,你获得的分数比例 取决于 —— 你的解在该子任务及其所有依赖子任务中使用的最大不同颜色数量(包括颜色 0):
- 若你的解在任一子测试失败,则 ;
- 若 ,则 ;
- 若 ,则 ;
- 若 ,则 ;
- 若 ,则 。
子任务
| 子任务 | 分值 | 依赖子任务 | 额外约束 | |
|---|---|---|---|---|
| 0 | - | 示例。 | ||
| 1 | 6 | 图是一个环。 | ||
| 2 | 7 | 图是一个星图。 | ||
| 3 | 9 | 图是一条链。 | ||
| 4 | 16 | 图是一棵树。 | ||
| 5 | 27 | - | 所有节点的度数不超过 3,且机器人起始节点的度数为 1。 | |
| 6 | 28 | 无额外限制。 | ||
| 7 | - | |||
环图的边为:,其中 。
星图的边为:,其中 。
链图的边为:,其中 。
树是没有环的图。
翻译由 ChatGPT-5 完成。
 京公网安备 11011102002149号
京公网安备 11011102002149号