[CCO 2025] Patrol Robot
说明
坐标控制组织(Coordinate Control Organization)开发了一款自主机器人,用于在二维平面上巡逻 个不同的重要地点。第 个地点的坐标为 ,且保证任意三个地点不共线。
为了引导机器人巡逻,你可以在地面上绘制一些线段。每条线段必须直接连接两个重要地点,且任意两条线段不能相交(端点处除外)。
机器人将从任意一条线段的中点开始巡逻,初始朝向该线段的某一端点。它将按照以下规则无限移动:
- 只要机器人位于某条线段的内部,它就会向前移动,朝线段的一个端点前进。
- 当机器人到达一个重要地点时,它最初会背向刚刚经过的线段。机器人将向右(顺时针)旋转,直到视线与一条从当前地点出发的线段对齐,然后开始沿这条新线段移动。

你的任务是绘制这些线段,使得无论机器人从何处开始,都能保证无限次访问每一个重要地点。可以证明这总是可行的。
输入格式
第一行输入一个整数 (),表示重要地点的数量。
接下来的 行每行包含两个以空格分隔的整数 和 (),表示第 个重要地点的坐标。
保证所有 个重要地点互不相同,且任意三点不共线。
输出格式
第一行输出一个正整数 ,表示你绘制的线段数量。
接下来的 行每行包含两个以空格分隔的整数 和 (,),表示你在第 个和第 个重要地点之间绘制了一条线段。
如果有多种可行解,输出其中任意一种即可。
4
0 0
1 1
1 2
2 1
3
1 2
2 3
2 4
8
0 0
0 3
1 1
1 2
4 1
4 2
5 0
5 3
9
1 2
2 4
4 8
8 7
7 5
5 1
3 4
4 5
5 6
提示
样例 1 解释
重要地点及绘制的线段如下图所示:
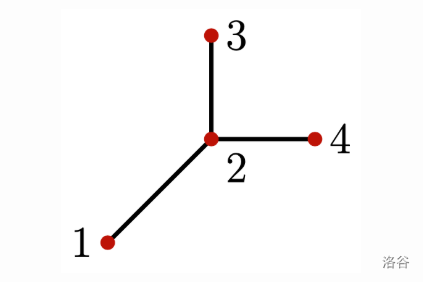
无论机器人从何处开始,它都会无限次访问每一个重要地点。例如,如果机器人从地点 和 之间的线段中点开始,朝向地点 ,则机器人访问地点的顺序为:
其中下划线部分无限循环。
样例 2 解释
重要地点及绘制的线段如下图所示:
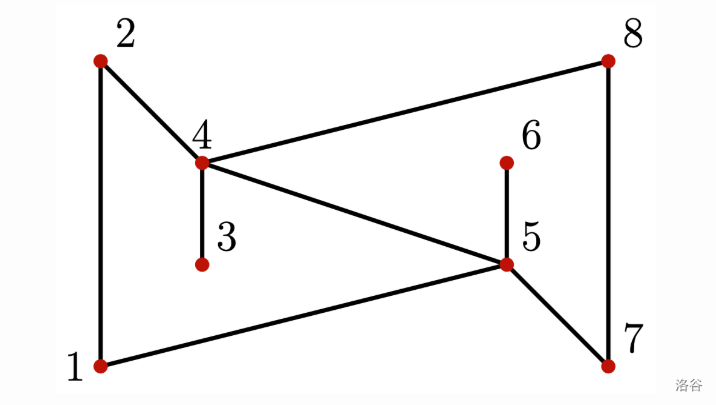
无论机器人从何处开始,它都会无限次访问每一个重要地点。例如,如果机器人从地点 和 之间的线段中点开始,朝向地点 ,则机器人访问地点的顺序为:
其中下划线部分无限循环。注意,并非所有线段都需要被无限次遍历,只要每个地点被无限次访问即可。
以下表格展示了 25 分的分布情况:
| 分值 | 额外约束条件 |
|---|---|
| 2 分 | |
| 4 分 | |
| 3 分 | 且所有 个点按某种顺序构成凸多边形的顶点。 |
| 7 分 | 个点构成一个 个顶点的凸多边形,外加一个内部点。 |
| 9 分 | 无额外约束 |
翻译由 DeepSeek V3 完成
 京公网安备 11011102002149号
京公网安备 11011102002149号