#P15517. [CEOI 2023] How to Avoid Disqualification in 75 Easy Steps
[CEOI 2023] How to Avoid Disqualification in 75 Easy Steps
Description
You are standing in front of the open safe, a medal in your hand. But your triumph turns to despair as you look around: a message on a tie you found in the room reveals that your assistant exposed your plan to the Scientific Committee! Now the two committee chairmen are hiding in the building to stop you from escaping…
Luckily, you have vacuum cleaner robots left over from your trade with your fellow contestants. You want to use these robots to locate the two chairmen so that you can avoid them during your escape.
You can instruct each robot to scout several of 1000 positions where the chairmen could be located. Unfortunately, the software of these robots is quite simple (After all, you sold all the fancy ones to the other contestants!). Each robot can only detect whether or not there is at least one chairman at its scouted positions.
To make things worse, every robot needs a full hour to scout its positions before returning with its result to you. Because this will drain the robot’s battery, you can send out each robot only once.
As you don’t want to be late for the evening activities, you want to know the positions of the chairmen after at most hours. In particular, you might be forced to send out several robots at once without waiting for the previous robots to return. You can assume that the two chairmen stay at the same positions all the time (Due to the late-night task preparations they are simply too exhausted to move.).
Write a program which plans this scouting mission and determines where the two chairmen are located.
Communication
This is a communication task. You must implement the function pair<int, int> scout(int R, int H) where and are as described above. For each testcase, this function is called exactly once and should return a pair of two integers ( is allowed), the positions of the two chairmen.
Inside scout, you can use the following other functions provided by the grader:
-
void send(vector<int> P)sends a robot to scout the positions (where is the length of the array ). The positions must be pairwise distinct integers between 1 and 1000. You can call this function at most times per testcase. -
vector<int> wait()waits an hour. This function returns an array with exactly one entry for each robot sent out one hour ago (by a call tosendafter the previous call towaitor after the beginning of the program). The entry at index is 1 if the -th of these robots has detected at least one chairman at its scouted positions, and 0 otherwise. You can call this function at most times per testcase.
If any of your function calls does not satisfy the above constraints, your program will be immediately terminated and judged as Not correct for the respective testcase. You must not write to standard output or read from standard input; otherwise, you may receive the verdict Security violation!. You are however free to write to the standard error stream (stderr).
Warning: you mustn't include the file avoid.h when submitting to Luogu.
You must include the file avoid.h in your source code. To test your program locally, you can link it with sample_grader.cpp, which can be found in the attachment for this task in cms. See below for a description of the sample grader, and see sample_grader.cpp for instructions on how to run it with your program. The attachment also contains a sample implementation as avoid_sample.cpp.
Hint
Constraints and Grading
Subtask 1 (10 points): , and both chairmen are located at the same position.
Subtask 2 (5 points):
Subtask 3 (10 points): ,
Subtask 4 (75 points): ,
Partial scoring: In Subtask 4, your actual score depends on the maximum number of robots sent out over all testcases in this subtask according to the following piecewise linear function:
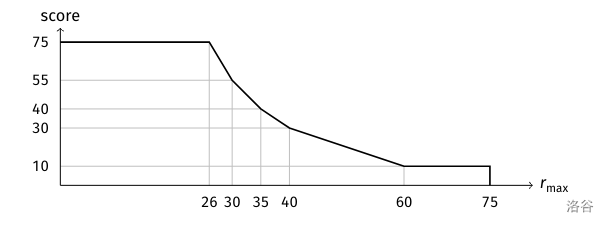
In particular, to get full score you must not make more than calls to send per testcase in the last subtask. You can also find a table listing all the individual scores in the attachments for this task as score_table.txt.
Example Interaction
Consider a testcase with and where the chairmen are located at positions 13 and 37.
First, the grader calls your function scout as scout(75, 20). Then, an interaction between your program and the grader could look as follows:
| Your Program | Return Value | Explanation |
|---|---|---|
send({42, 13, 37}) |
— | Send a robot to positions 13, 37, and 42 |
send({47, 11}) |
Send a robot to positions 11 and 47 | |
wait() |
{1, 0} | Wait an hour for the return of the robots; only the first robot has detected a chairman |
send({42}) |
— | Send a robot to position 42 |
wait() |
{0} | Wait an hour; there is no chairman at position 42 |
return {13, 37} |
— | You are convinced that the chairmen are located at positions 13 and 37 |
The solution is correct and is accepted.
Returning the pair {37, 13} would be accepted as well. Note that the above queries are of course not sufficient to determine the positions of the chairmen with certainty: For example, both being at position 37 or one chairman being at position 13 while the other is at position 100 would also be consistent with all answers to wait, so the grader could also have rejected this solution.
The above interaction is reproduced by avoid_sample.cpp on the public testcase.
Grader
The sample grader first expects on standard input the integers and and the positions and of the chairmen (). Then, the grader calls scout(R, H) and writes to standard output a protocol of all grader functions called by your program. Upon termination, it writes one of the following messages to standard output:
- Invalid input: The input to the grader via standard input was not of the above format.
- Invalid send: You called
sendwith invalid parameters. - Out of robots: You called
sendmore than times. - Out of time: You called
waitmore than times. - Wrong answer: The positions returned by
scoutare not the positions of the chairmen. - Correct: robot(s) used, hour(s) passed. The positions returned by
scoutare the positions of the chairmen, there were calls tosend, and there were calls towait.
In contrast, the grader actually used to judge your program will only output Not correct (for any of the above errors), Security violation!, or Correct: r robot(s) used, h hour(s) passed. Moreover, the grader is adaptive, i.e., the positions of the chairmen may depend on the behavior of your program in the current as well as in earlier runs. Both the sample grader and the grader used to judge your program will terminate your program automatically whenever one of the above errors occurs.
 京公网安备 11011102002149号
京公网安备 11011102002149号